[해외 연구] - Science 논문 요약문)
인체 운동 보조 로봇의 발전과 미래 전망
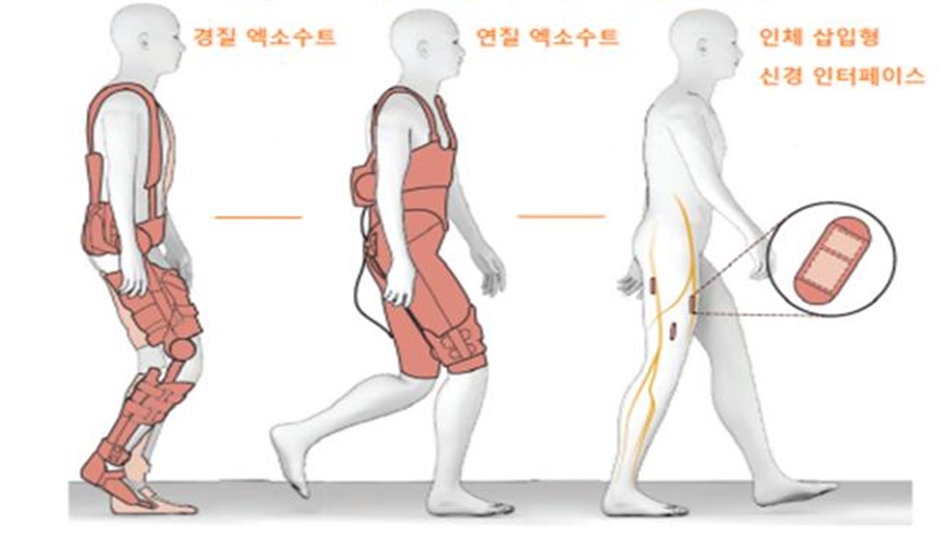
인체 내에 삽입하는 신경 보형물이 인간 활동 보조하는 수단으로 등장
인체에 착용하는 인공 골격(exoskeleton)이나 연질의 엑소수트(exosuit)와 같은 소위 ‘웨어러블’ 로봇들은 신체 기능을 보조하거나, 절단된 사지(四肢)를 대체할 수 있다. 로봇이 이러한 기능을 원활하게 수행하기 위해서는 로봇과 사람 간의 인식의 교감과 신체적 상호작용이 이루어져야 한다. 로봇은 이를 착용하는 사람과의 물리적 상호작용을 통해서 착용자의 신체적 한계를 극복할 수 있는 힘을 제공하고, 인식의 상호작용으로 착용자가 로봇을 조절 통제한다. 지난 8월 19일 발간된 사이언스지는 로봇이 사람과의 인식 교감을 통해서 걷는 행동과 뛰는 행동을 구분하여 사람의 행동을 보조할 수 있는 연질의 엑소수트를 개발한 논문을 개제하였다.(1~3)
초기의 착용형 로봇이나 엑소수트는 건강하지만 보행이 불편한 사람들이 걷거나 뛰는데 드는 신진대사 에너지를 절약하고, 신경계통의 장애가 있는 환자들의 신체적 치료를 돕기 위해서 개발되었다. 신경 치료의 경우 로봇들은 환자들이 발휘하는 힘을 보조해 줌으로써 운동능력을 증진시키는데, 이러한 보조적 힘을 환자에게 효율적으로 전달하는 것이 문제의 핵심이었다. 위 논문의 저자들인 하버드 대학교의 김진수 등은 걷거나 뛰는 모드를 구분해서 각 모드에 알맞은 기능을 전달할 수 있는 알고리듬을 개발하여 각 모드에 해당되는 엉덩이 근육의 확장 운동을 도와서 진신대사 에너지를 감소시키는 연성의 엑소수트를 개발하였다.
 |
인용문헌: https://science.sciencemag.org/content/sci/365/6454/636.full.pdf
지금까지는 주로 사람의 사지 신경의 동적 특성을 이용해서 다양한 속도 범위에서 효율적으로 운동을 할 수 있는 웨어러블 로봇이나 엑소수트들이 개발되었으나, 이 경우 사람의 관절과 로봇의 인공 관절이 정렬되지 않아 착용자의 의도와는 달리 두 관절이 서로 반대 방향의 힘을 발생시키는 등의 문제들이 발생하곤 하였다. 그러나 이러한 신경 역학적 문제들에도 불구하고 웨어러블 로봇 기술은 거동이 불편한 사람의 운동을 보조하는 수단으로 이용되고 있다.
하버드 대학교의 김진수 등은 착용자의 의도를 엑소수트에 원만하게 전달할 수 있는 방법을 고안하였다. 즉, 이들은 로봇 착용자의 운동에너지와 위치에너지의 변화를 탐지하여 착용자가 걷고자 하는지 또는 뛰고자 하는지를 구분할 수 있는 알고리듬을 개발하였다. 실제로 사용자의 행동이나 의도를 탐지하기란 매우 어려운데, 예를 들면, 착용자가 의수(義手)를 착용했을 때와 같이 변수가 늘어나도 로봇이 에너지를 정확하고도 끊임없이 전달할 수 있어야 한다.
사람과 로봇 간에는 인체 신경의 전기적 신호를 해독하는 알고리듬을 이용해서 명령이 전달되는데, 이 경우 다양한 입력신호들이 이용된다. 예를 들면, 센서들을 인체에 삽입하거나 또는 비-삽입 방법으로 중추신경계 또는 말초신경계에서 전달되는 전기적 신호들을 입력신호로 이용한다. 인간과 로봇 간의 이상적인 신경망 인터페이스는 연결이 단순하고, 보정하지 않고도 다양한 기능을 수행하고, 높은 시공간적 해상도를 가지며, 기능을 수행하는 신경세포의 표본 추출이 용이하고, 장기간 안정성을 유지할 수 있어야 하지만, 실제로 현재의 데이터 기록 및 신호처리 기술이 이러한 요구 조건들을 만족시키지 못하고 있어서 새로운 신경계 인터페이스 기술의 개발이 요구되고 있다.
중추신경계에 비해 말초신경계가 비교적 덜 복잡하고, 최근 근육에 전달되는 신경자극을 해독하는 기술이 발전하면서 앞으로 몇 년 안에 사람과 로봇 간의 신경계 인터페이스를 통해서 인간 활동에 관여하는 신경 전달 신호를 로봇과 교신할 수 있는 웨어러블 로봇이 등장할 전망이다. 인간의 생체역학에 최소한의 영향을 미치는 웨어러블 로봇 기술이 발전하면 현재의 견고한 착용형 로봇은 김진수 등이 보고한 것과 같은 연성의 엑소수트 등으로 바뀌고, 궁극적으로는 인체 내에 삽입하는 신경 보형물이 인간 활동을 보조하는 수단으로 등장하게 될 전망이다. 결론적으로 인체에 삽입된 장치가 인간의 신경 역학에 영향을 거의 주지 않으면서 착용자의 의도를 파악해서 인간 활동을 보조할 수 있는 날이 올 것이다.
Reference:
1. Jinsoo Kim, et al., "Reducing the metabolic rate of walking and running with a versatile, portable exosuit", Science, 365, pp.668~672 (2019)
2. https://science.sciencemag.org/content/sci/365/6454/636.full.pdf
3. 사이언스 뉴스: 인체 운동 보조 로봇의 발전과 미래 전망 (2019. 8. 19)
 |
※ 작성자 ※
이준웅, Ph.D.,
Imperial College, University of London(1976), 전 국방과학연구소 책임연구원, 전 한국과학기술정보연구원 전문연구위원, (현재) 한국시니어과학기술인협회 정회원(연구위원) (e-mail: dalmaioikr@naver.com, 노벨사이언스 편집위원
노벨사이언스 science@nobelscience.co.kr